专注起重机安全监控管理系统为工业安全行业保驾护航!


引言
塔式起重机大规模应用于工程建设中,我国每年都会发生
多起塔机倒塌事故⋯。为了防止重大事故的发生,保证塔机运
行安全可靠,减少因事故造成的人员和经济损失,非常有必要
开发一套可靠性和实时性高、功能强大、成本低的安全监控系
统。控制器局域网CAN(ControllerAreaNetwork)总线是一种有
效支持分布式实时控制的串行通信网络。CAN总线由于具有
传输距离长、报文短、通信速率高、出错率低、纠错能力强、实时
性和可靠性高、控制简单等优点j,被广泛应用于自动化控制
系统中。基于CAN总线的塔机安全监控系统可以很好的满足
上述要求。
系统网络拓扑采用总线型拓扑。这种结构优点是采用单 一 信道作为传输介质,所需电缆长度短,布线容易,工作的可靠 性高,增加和减少节点都很方便。
一 、塔机安全监控系统设计
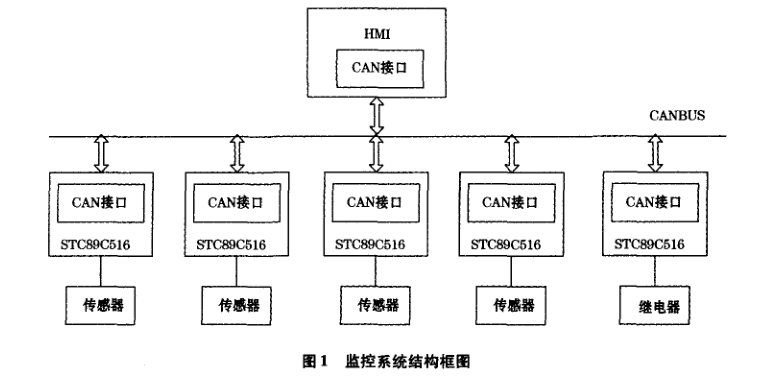
1.1监控系统整体结构设计
塔机安全监控管理系统主要由HMI、CAN总线、数据采集模块和继电器
模块组成,系统结构如图1所示。系统数据采集模块有起重量
检测模块、幅度检测模块、高度检测模块和角度检测模块。HMI
通过CAN接口将系统初始参数(起重零点和参考载重校准信
号、最小幅度和最大幅度校准信号、起升高度零点和起升标准
高度校准信号、回转角度零点校准信号)发送到CAN总线上,
各数据采集模块通过判断接收保存需要的参数。传感器检测
塔机运行时的工作参数:起吊重量、小车行走幅度、重物提升高
度和臂架回转角度,各个数据采集模块的MCU将检测到的数
据处理后通过CAN接口实时发送到CAN总线上,HMI通过
CAN接口接收数据采集模块发送到CAN总线上的数据,并通
过硬件和软件编程方式对接收到的现场数据进行显示、存储、
比较报警处理。
塔机安全监控系统主要功能:
(1)实时检测功能,实时监测塔机运行时的各状态参数。
(2)实时显示功能,实时显示塔机运行时的工作参数值。
(3)报警和自动断电停机功能,系统识别塔机的运行状态
后,做出相应的处理。当塔机运行时的状态参数值超过其设定
的极限值时,系统报警并断电停止塔机工作。
(4)参数设定功能,由于不同型号塔机具有不同的固定参
数,可通过按键实现系统参数的修改设置,提高系统的通用性。
(5)数据存储功能,记录塔机工作参数,作为分析事故原因
的原始数据以及塔机工作损耗的参考。
1.2硬件电路设计
该监控系统硬件主要有单片机STC89C516、液晶显示器
CA320240B、CAN接口、CAN总线、A/D转换芯片、U盘及U盘
接口芯片等。系统以STC89C516为核心,实现对塔机运行过程
状态的监控、显示、记录和报警。系统模块有人机界面模块、数
据采集模块和继电器模块。数据采集模块共有4个部分:起重
量检测模块、幅度检测模块、高度检测模块和角度检测模块,完
成基本的模拟量和数字量的采集及CAN总线的通信功能。
1.2.1CAN总线
CAN总线是一种性价比非常高的现场总线,与一般的通信
总线相比,它的数据通信具有突出的可靠性、实时性和灵活
性J。主要技术特点有:多主方式;节点分成不同的优先级,可
满足不同的实时要求;采用非破坏总线仲裁技术;极好的检错
效果;通信距离最长lOkm,速率最高达1Mbps.CAN总线上任
意2个节点之间的最大传输距离与其位速率的关系
塔机上的通信距离一般就几十m长,CAN总线完全可以
满足要求,结合塔机工作的实际情况,选择最高通信速率1Mb-
ps·
1.2.2CAN接口电路设计
CAN接口主要由CAN控制器SJA1000和CAN收发器
TJA1050组成。CAN控制器SJA1000支持CAN2.0A和
CAN2.0B协议,可以支持11位、29位标识码,具有很强的扩展
性。CAN收发器TJA1050是CAN控制器与物理总线之间的接
口芯片,支持对CAN总线的差动发送和接收功能。它的电磁
抗干扰EMI性极高,且与ISO11898标准完全兼容。CAN总线
接口是数据采集模块和上位机通信的模块,如图2所示。
SJA1000与单片机的引脚连接如图所示。TJA1050的引脚8
(S)用于选定收发器的工作模式,引脚接地表示TJA1050进入
高速模式。收发器和总线的接口部分必须要加保护防干扰电
路,和魄为CAN匹配电阻,电容C具有退藕作用,c3和c4
起滤波作用。
1.2.3起重量数据采集模块硬件电路设计
塔机的工作环境恶劣,周围各种干扰较为严重,系统的抗
干扰能力、可靠性、通用性和灵活性要强,根据CAN通信模块
加上不同外部电路,电源电压调节电路人机接口输入电路等。
模块的电路结构如图3。
重量检测模块传感器采用DEE系列称重传感器,为了提高
测量的准确性,根据实际情况不同吨位的塔机应采用不同量程
的传感器。A/D转换采用16位高精度串行模数转换器
CS5523,该芯片内集成了1个仪表放大器、1个可编程增益放大
器、多路开关、数字滤波器、自校正和系统校正电路。通过简单
的串行连接,MCU可方便地控制CS5523,实现多通道高精度的A/D转换。
传感器将检测到的信号,经A/D转换器处理将模拟信号转换成数字信号输入MCU,MCU进一步处理数据,在程序中计算当前重量以及当
前重量占总重量的百分比。电路中单片机的外部中断信息由SJA1000的内部寄存器,提取数据确定具体的中断事件,并做出下应的反
馈。
1.2.4 其它数据采集模块电路设计
其它数据采集模块和角度检测模块的检测工作原理完全相同。在塔机幅度、高度和角度限制器的伸出軕上加一块一半是N极一
半是S极的圆形磁铁,当塔机工作时磁铁和轴一起旋转,利用磁铁转极性的变化检测出小车牵引器机、卷杨机和塔臂转过的圈数,在
程序中计算出幅度、高度和角度。硬件原理框如图4所示
1.2.5人机界面硬件电路设计
图5为人机界面原理框图,液晶显示器CA320240B使用功能强大的S1D13305作为控制器。内部固化160种5*7点陈的字符,具有文本和图
形混合显示功能,系统采用Inte8080时序。
显示器实时显示塔机工作时的力矩、重量、幅度、高度和角度数值,并图形显示塔机起重机特性图和当前工作点的位置。图6为塔机
起重特性图,图中阴影部分为塔机安全工作区域,正常工作点必须处于阴影区域内,当工作点超过最大力矩的80%时系统给出预警信
号(黄色LED灯亮报警),超过100%发出报警信号(红色LED灯亮和蜂鸣器报警),同时对继电影模块动作止电动工作。
系统采用大容量8GU盘存储数据,存储内容为塔机每次开作的年份、日期、开始时间、结束时间、开始高度、结束高度、开始角度、
最大力矩和警告。当发生安全事故或需要评估塔机的使用寿命时,可导出数据进行分析。


010-86380355 18600916628
北京市大兴区榆垡椿蓉园别墅区11号
河南省•国家大学科技园(东区)9号楼
